
Fether labs is pioneering new sensors for monitoring tendon dynamics in the wrist, enabling the seamless translation of hand movement into digital output.
Fether labs is pioneering new sensors for monitoring tendon dynamics in the wrist, enabling the seamless translation of hand movement into digital output.
Monitoring tendon dynamics
Monitoring tendon dynamics
Whether navigating a virtual interface with your hands or training a robot to touch and grab like a human, industries are struggling to measure the nuance of physical touch.
We are delivering the foundational layer of Bio-Mechanical Reality—high-fidelity sensing for the next era of Human-Machine Interface.
Whether navigating a virtual interface with your hands or training a robot to touch and grab like a human, industries are struggling to measure the nuance of physical touch.
We are delivering the foundational layer of Bio-Mechanical Reality—high-fidelity sensing for the next era of Human-Machine Interface.
engineered for Custom Gestures and Force Sensitivity
engineered for Custom Gestures and Force Sensitivity
Gesture Recognition and Precision IMU
Gesture Recognition and Precision IMU
Multi-Finger Force-Sensing
Multi-Finger Force-Sensing
Mechanical reality
Mechanical reality
Most gesture-control systems try to ‘see’ what you are doing from the outside or ‘listen’ to faint electrical signals from your skin. Fether Labs does something simpler and more reliable: It captures mechanical reality.
Most gesture-control systems try to ‘see’ what you are doing from the outside or ‘listen’ to faint electrical signals from your skin. FetherLabs does something simpler and more reliable:
It captures the mechanical reality.
The Physical Trigger
Every finger movement, grip, or gesture begins with the contraction of muscles in the forearm. This pulls on tendons that pass through your wrist like cables in a pulley system.
MECHANOTENDOGRAPHY
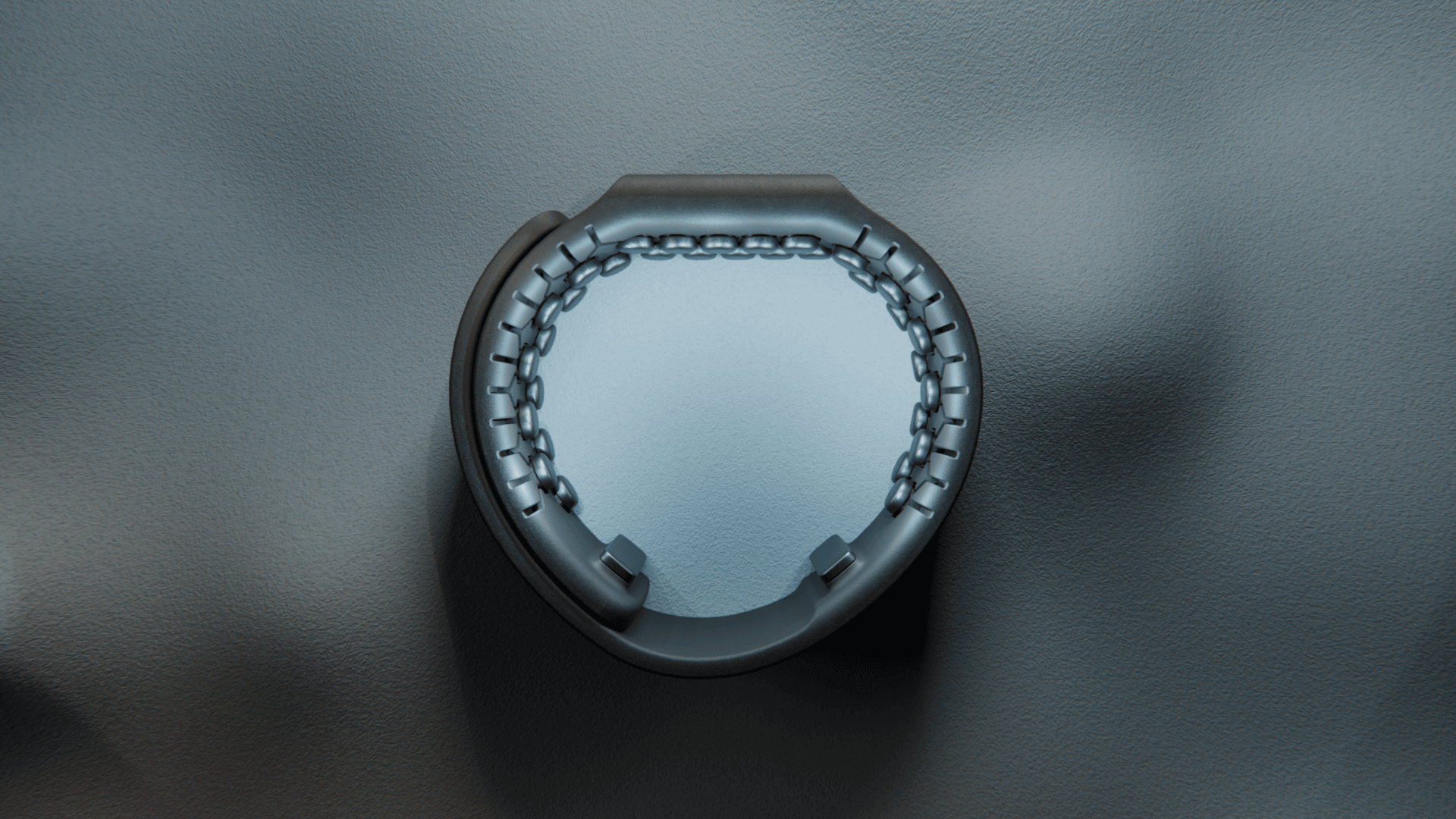
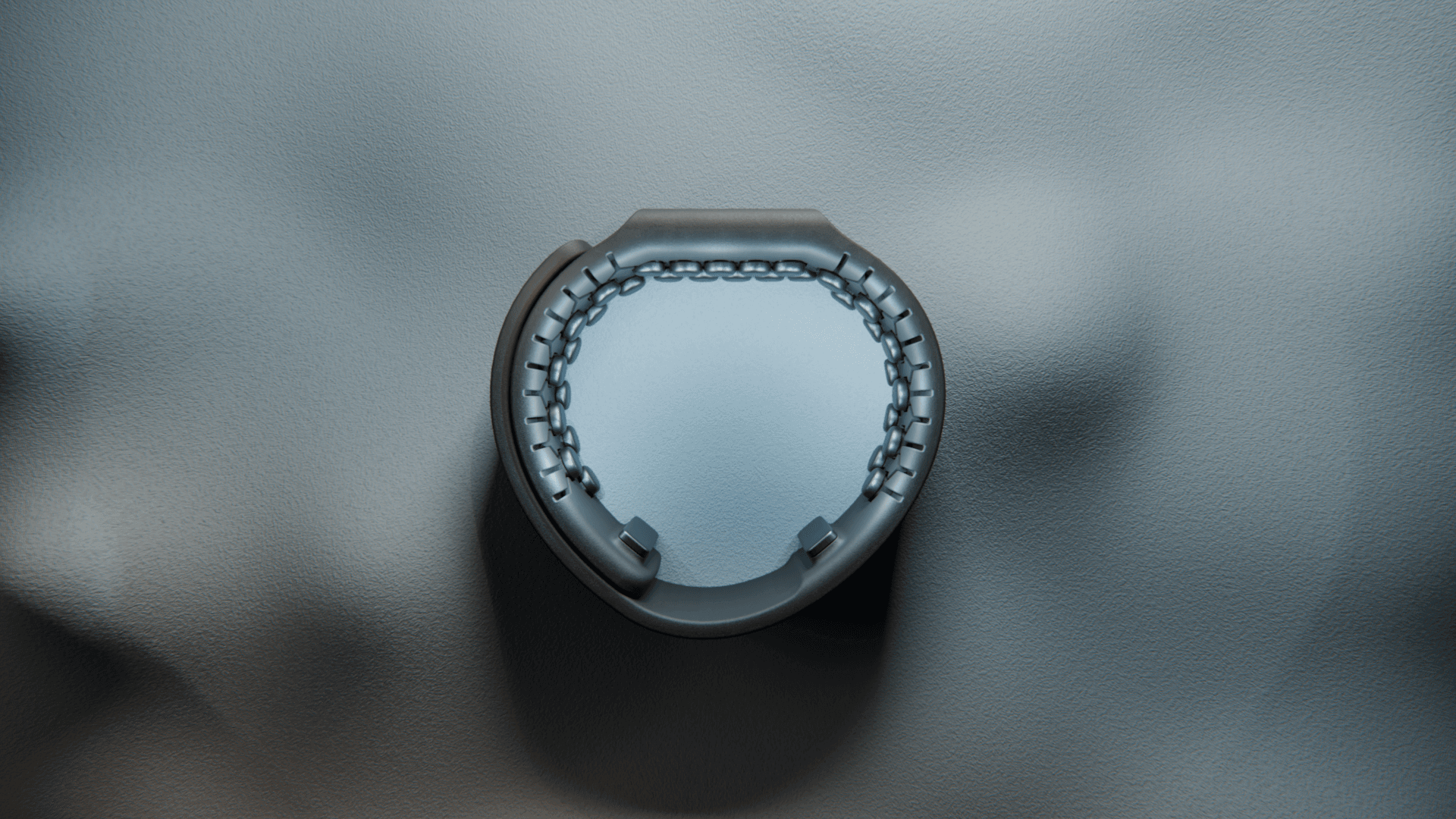
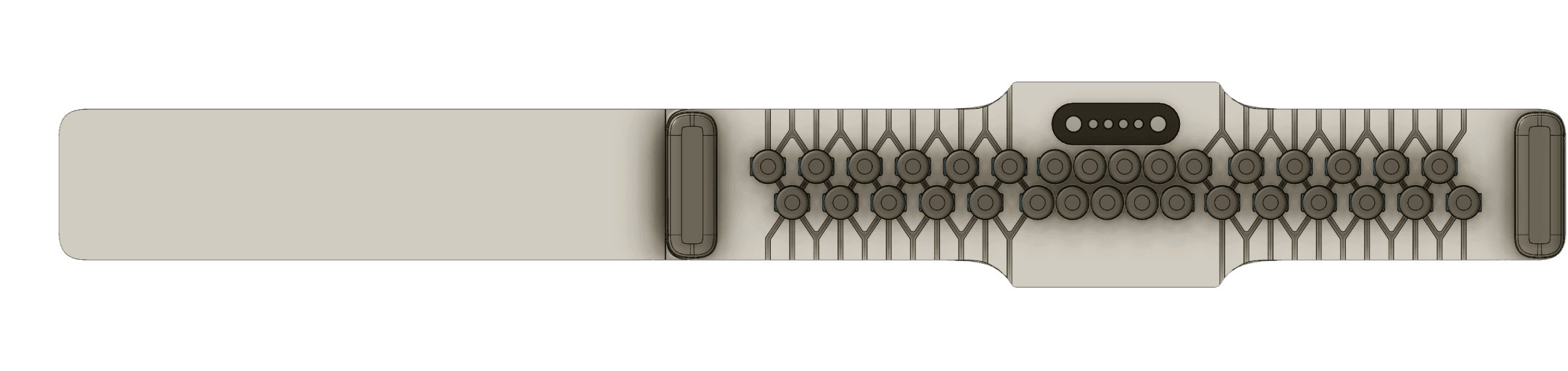
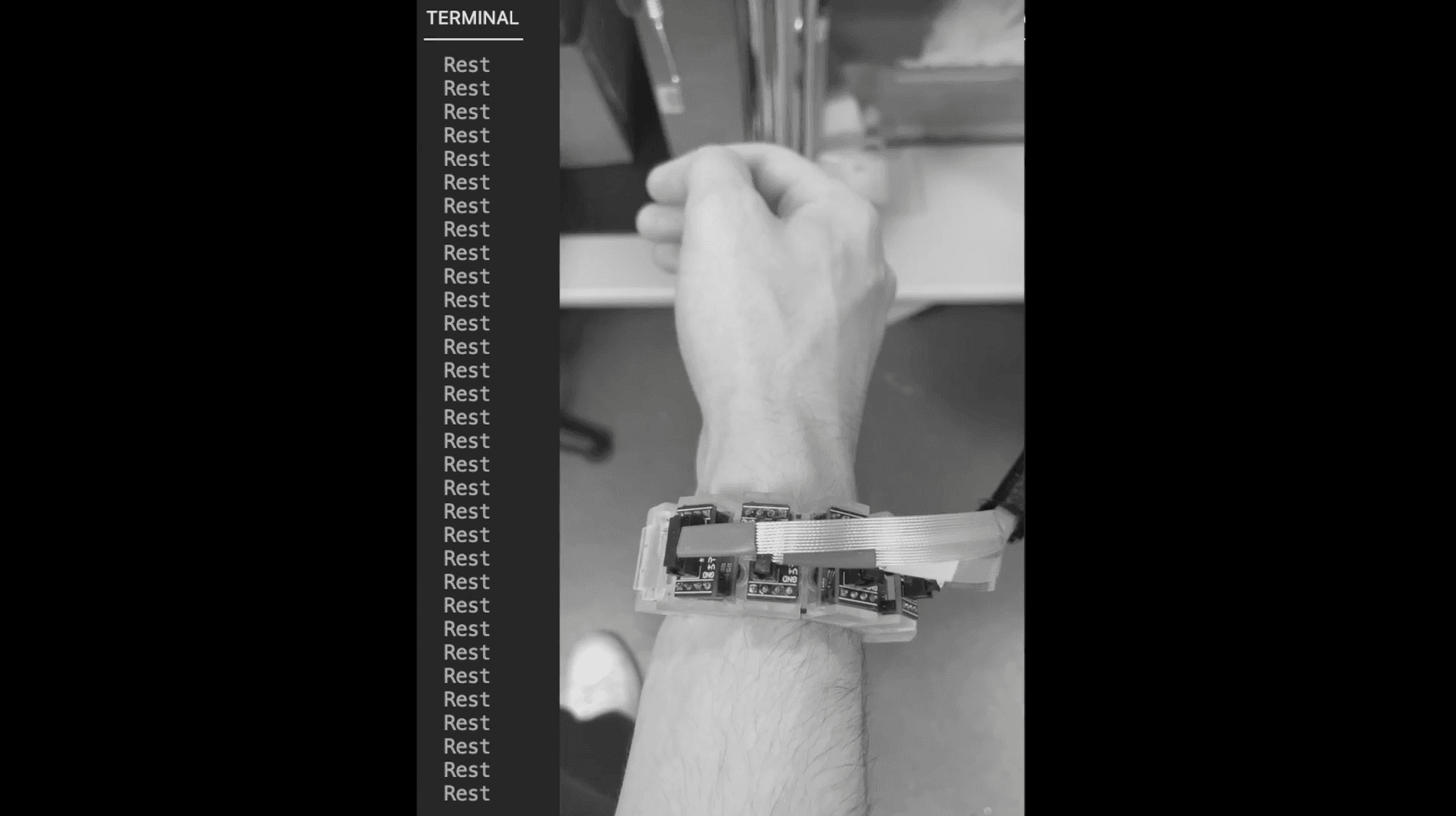
Our proprietary sensors sit on the wrist, measuring the displacement and mechanical pressure of the tendons in real-time.
The Physical Trigger
Every finger movement, grip, or gesture begins with the contraction of muscles in the forearm. This pulls on tendons that pass through your wrist like cables in a pulley system.
MECHANOTENDOGRAPHY
Our proprietary sensors sit on the wrist, measuring the displacement and mechanical pressure of the tendons in real-time.
The Physical Trigger
Every finger movement, grip, or gesture begins with the contraction of muscles in the forearm. This pulls on tendons that pass through your wrist like cables in a pulley system.
MECHANOTENDOGRAPHY
Our proprietary sensors sit on the wrist, measuring the displacement and mechanical pressure of the tendons in real-time.
VIDEO By CHRIS JONES
VIDEO By CHRIS JONES
our tech stack
Sensor design (patented)
hardware
signal conditioning circuitry
IMU integration
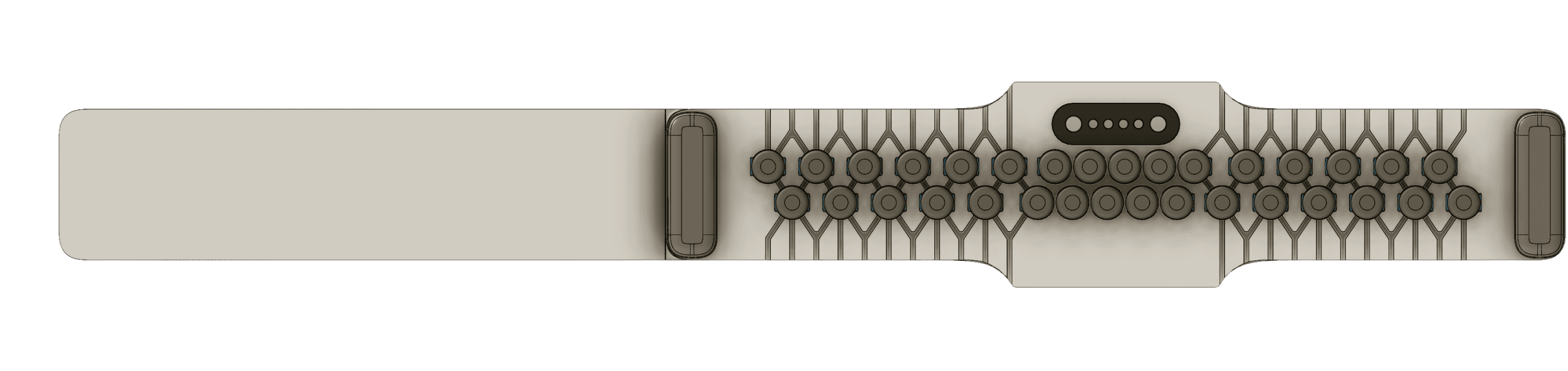
wristband and dev-kit
Gesture algorithms
software
Force sensing algorithms
dashboard
Device integration
data
proprietary User datasets
Sensor design ( patented (*2)
hardware
signal conditioning circuitry
IMU integration
wristband and dev-kit
Gesture algorithms
software
Force sensing algorithms
dashboard
Device integration
data
proprietary User datasets
REDEFINE HOW WE CONTROL ALL DEVICES
HAPTIC ENGINE
fully programmable
HAPTIC ENGINE
fully programmable
PROPRIETARY SENSER DESIGN
CUSTOM MADE Mechanically Isolated Dense Array of Sensors
MIDAS
CUSTOM MADE Mechanically Isolated Dense Array of Sensors
9 Axis IMU
accelerometer, gyroscope and magnetometer
PROPRIETARY SENSER DESIGN
CUSTOM MADE Mechanically Isolated Dense Array of Sensors
HAPTIC ENGINE
fully programmable
9 Axis IMU
accelerometer, gyroscope and magnetometer
First wristband to detect all fingers
detects all fingers
Force sensing with objects
Force sensing with objects
resistant to sweat and hair
resistant to sweat and hair
Custom gestures in seconds
Custom gestures in seconds
ENVIRONMENTALLY robust
ENVIRONMENTALLY robust
Our developer-kit comes with a web-based platform to create custom gestures within seconds and a comprehensive range of APIs enabling you to gain access for any platform or device
Our developer-kit comes with a web-based platform to create custom gestures within seconds and a comprehensive range of APIs enabling you to gain access for any platform or device.
our platform
our platform
Join the dev-kit wait list
Join the dev-kit
wait list
Industry INSIGHTS
Industry INSIGHTS
Beyond-FOV:
Monitor tendon dynamics to enable interaction outside the camera’s field of view.Force-Gated Certainty:
Use physical resistance to ensure click confidence.Rapid Customisation:
Avoid large datasets to reduce R&D costs and time-to-market.Analog Control:
Measure squeeze intensity to provide deep, analog UI control beyond simple binary clicks.WEARABLES
Beyond-FOV:
Monitoring tendon dynamics to enable interaction outside the camera’s field of view.Force-Gated Certainty:
Using physical resistance to ensure click confidence.Rapid Customisation:
Avoiding large datasets to reduce R&D costs and time-to-market.Analog Control:
Measuring squeeze intensity to provide deep, analog UI control beyond simple binary clicks.Manufacturers are struggling to integrate reliable gesture recognition into existing lines without sacrificing accuracy in complex environments
OUR GOALS
TRAINING DATA
High Signal-to-Noise Ratio:
Deliver ultra-clean signals for ML training.Rapid Re-tasking:
Reduce training time from weeks to hours by learning from just one or two demonstrations.Multimodal Data Fusion:
Synchronise vision, force, and proprioception into a single stream to bridge the "Sim-to-Real" gap.Force-Aware Training:
Capture grip pressure and stiffness to eliminate the handling errors of vision-only systems.Robotic dexterity is slowed by a critical shortage of tactile training data, preventing machines from mastering force-aware, human-like movement
OUR GOALS
INDUSTRY 4.0
Uninterrupted workflow:
Enable hands-free robot guidance and assembly steps, allowing workers to manage tools and parts without distraction.Industrial Grade Reliability:
Maintain data integrity through contaminants like oil and sweat, remaining immune to electrical interference.Precision Force Feedback:
Deliver precise analog control through high-fidelity force feedback.Enhanced Safety Protocols:
Detect high-tension hand profiles to trigger emergency responses.Industrial operators seeking "Industrial-Grade" hands-free control that remains reliable in harsh environments.
OUR GOALS
SMART HOME
Universal Control Standard:
A single interface providing a consistent interaction method across an entire device ecosystem.Micro-Gesture Library:
Subtle physical triggers that eliminate the need for voice commands or conspicuous movements.Surface Resilience:
Maintain high-precision control even when hands are wet, messy, or occupied.Modular Integration:
Integrate seamlessly into any existing accessory or product line.The smart home experience remains fragmented because manufacturers lack a singular, intuitive interface to control an entire device ecosystem.
OUR GOALS
SPORTS & REHAB
High Signal-to-Noise Ratio:
Deliver ultra-clean signals for ML training.Rapid Re-tasking:
Reduce training time from weeks to hours by learning from just one or two demonstrations.Multimodal Data Fusion:
Synchronise vision, force, and proprioception into a single stream to bridge the "Sim-to-Real" gap.Force-Aware Training:
Capture grip pressure and stiffness to eliminate the handling errors of vision-only systems.Both clinicians and elite athletes require objective, remote tools, such as tendon tracking and biomechanical load monitoring to optimize recovery and performance while preventing injury without expensive optical setups.
wearables
Manufacturers are struggling to integrate reliable gesture recognition into existing lines without sacrificing accuracy in complex environments
OUR GOALS
training data
High Signal-to-Noise Ratio:
Deliver ultra-clean signals for ML training.Rapid Re-tasking:
Reduce training time from weeks to hours by learning from just one or two demonstrations.Multimodal Data Fusion:
Synchronise vision, force, and proprioception into a single stream to bridge the "Sim-to-Real" gap.Force-Aware Training:
Capture grip pressure and stiffness to eliminate the handling errors of vision-only systems.Robotic dexterity is slowed by a critical shortage of tactile training data, preventing machines from mastering force-aware, human-like movement
OUR GOALS
INDUSTRY 4.0
Industrial operators seeking "Industrial-Grade" hands free control that remains reliable in harsh environments.
OUR GOALS
SMART HOME
The smart home experience remains fragmented because manufacturers lack a singular, intuitive interface to control an entire device ecosystem.
OUR GOALS
SPORTS & REHAB
Both clinicians and elite athletes require objective, remote tools, such as tendon tracking and biomechanical load monitoring to optimize recovery and performance while preventing injury without expensive optical setups.
from foundational research to pilot applications.
from foundational research to pilot applications.
Fether Labs is currently an early-stage startup lab in a period of rapid, iterative development.
While our core technology is already proving its ability to translate tendon dynamics into digital output, we are actively moving from foundational research into real-world pilot applications.
We invite visionary collaborators to join us in scaling this technology to its full potential.
Fether Labs is currently an early-stage startup lab in a period of rapid, iterative development.
While our core technology is already proving its ability to translate tendon dynamics into digital output, we are actively moving from foundational research into real-world pilot applications.
We invite visionary collaborators to join us in scaling this technology to its full potential.
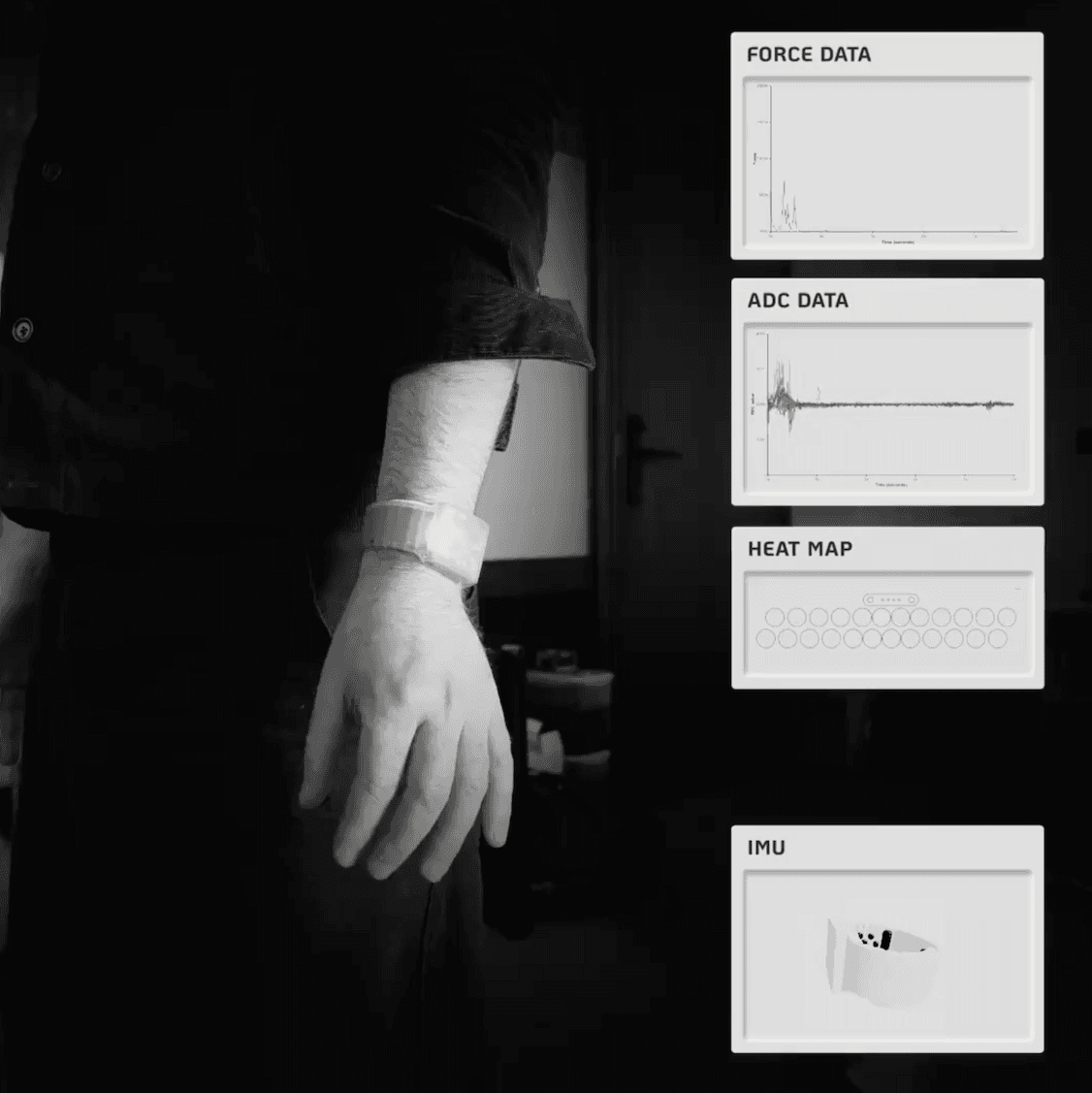
Data dashboard

Multi finger gesture recognition

Discreet gestures
Tap Video to play
In the lab
more
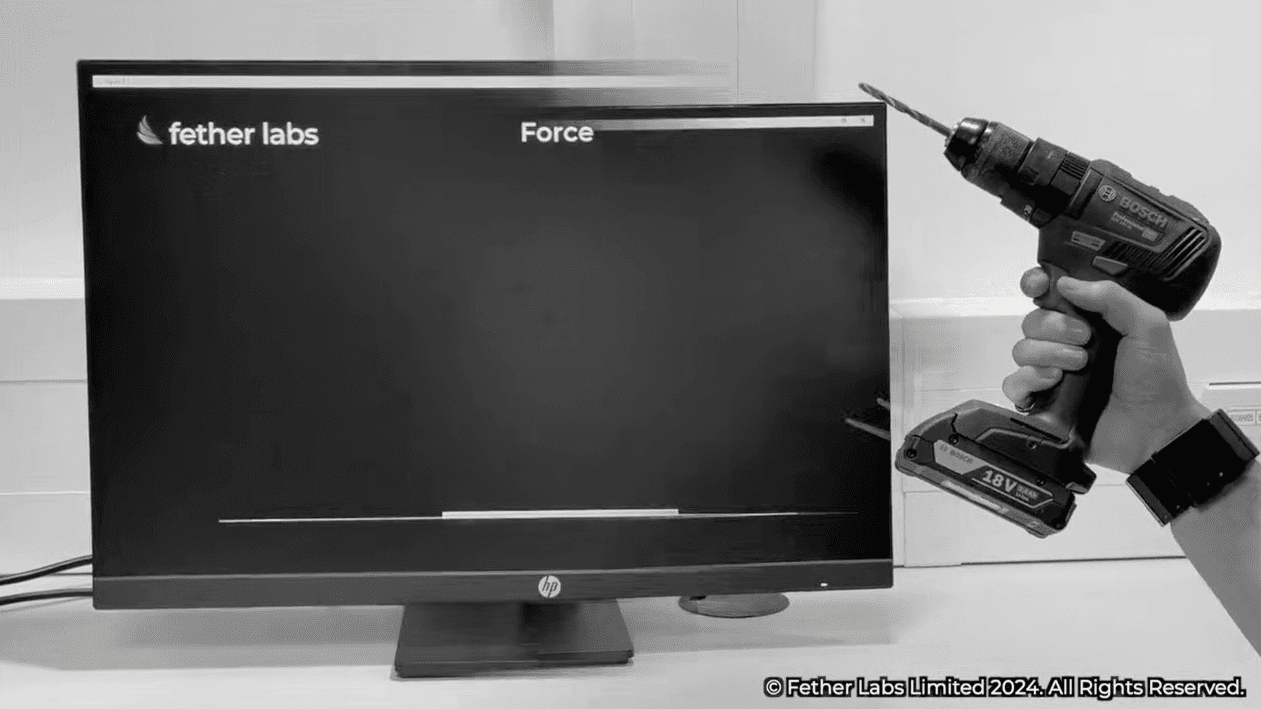
Grip strength measurements
Multi gestures on single finger
Multi finger gesture recognition
Discreet gestures
Data dashboard
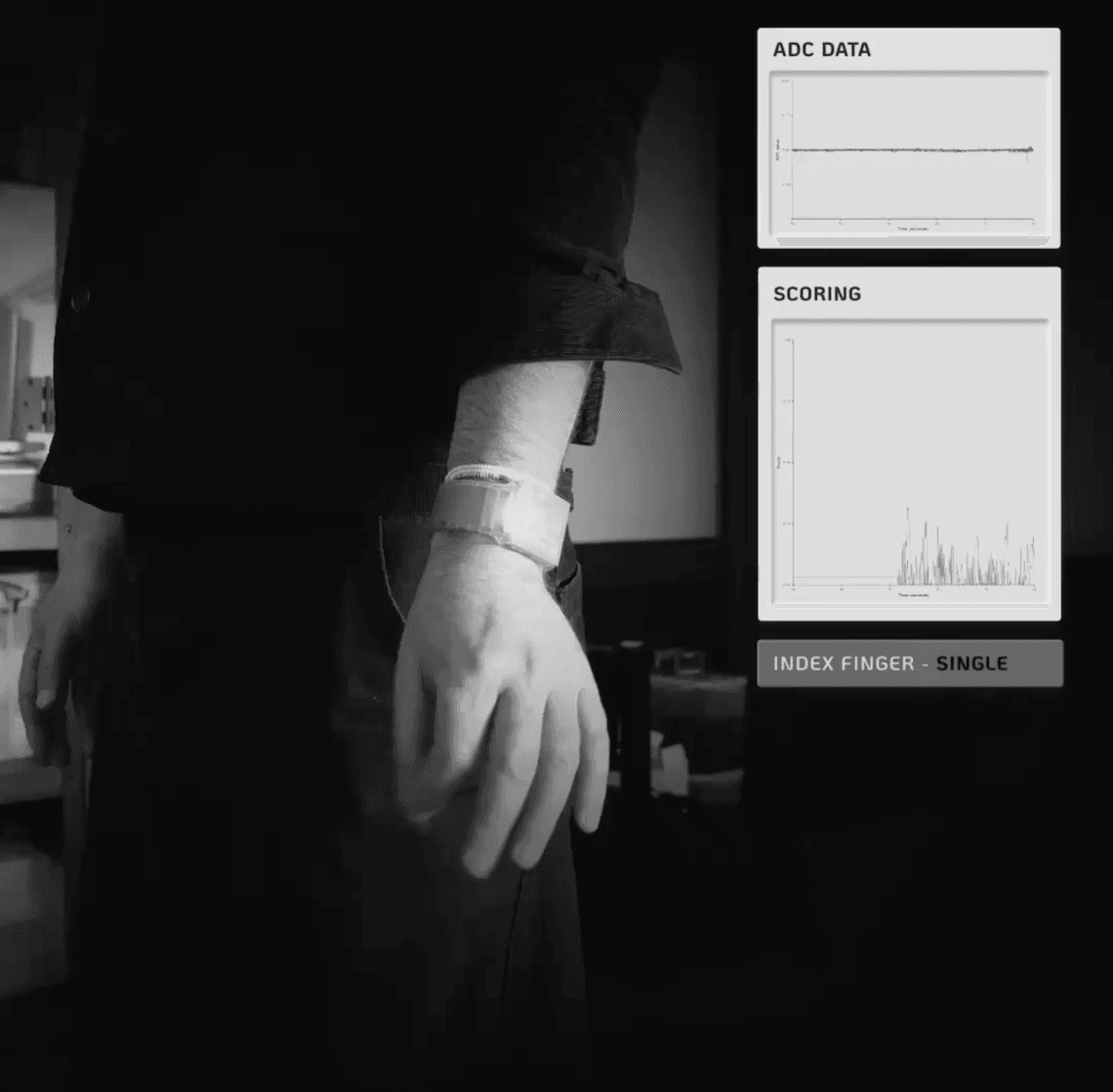
GESTURE SCORING
In the lab

Jacques Blagburn CEO
Jacques is the driving force behind Fether Labs, specializing in the intricate design of mechanical sensors and ultrasound transducers. His leadership and technical vision have already secured four prestigious awards and grants, setting a high bar for the company’s innovation.

Senthil Seveelavanan Dir Hardware
A true startup veteran, Senthil has over 15 years of experience in the consumer electronics space. His track record is defined by hands-on execution, having navigated five startups, launched six products, and successfully shepherded a company through an exit.
Dr James Choi CSO
With over 15 years of dedicated research in mechanical sensors and therapeutic ultrasound, James provides the scientific foundation for our work. He still serves as an Associate Professor at Imperial College London, staying at the absolute forefront of acoustic technology.

Alison Hart Dir Data Science
With a PhD in Applied Mathematics, Alison is an expert in mathematical modeling and experimentation across the medical, defense, and commercial sectors. A veteran founding engineer, specializing in building data pipelines and algorithm development from the ground up for high-growth tech startups

Michael Ma CTO
Michael serves as the architect of our technology, bringing deep expertise in algorithm development and cross-functional system design. He excels at bridging the gap between complex data and seamless system architecture, ensuring our hardware and software work in perfect harmony.

Emmanuelle Ghaleb Product Engineer
A biomedical engineer from Imperial College London with experience in both mechanical and electronic engineering. Emmanuelle leads physical prototyping efforts, ensuring fast iterative cycles and giving assembly feedback to the team. Emmanuelle leans on her prototyping and testing experience in the highly regulated medical device space.

Orlando Mathias Dir Product Experience
A seasoned innovator and founder of two award-winning agencies, Orlando leads our end-to-end product vision. He designs the gesture systems and spatial interaction grammars for our wristband. Bridging hardware and software to help shape the product roadmap and long-term experience strategy,

Zachary Berry Software Engineer
A dual-master’s graduate with distinction from Imperial College London and the RCA, Zak brings over four years of commercial experience in XR, robotics, and IoT. A Royal Commission scholar and international award winner, he holds a patent in prosthetics and have been published in renowned academic journals for his work in innovation design.
Joshua Ward MECHANICAL ENGINEER
With nearly a decade in design engineering at both startups and established companies, he is listed on 3 patents. In his free time, Josh has successfully completed his own Kickstarter products. He will be relying on his design for manufacture experience in commercial appliances and machinery to iterate the hardware.
Michael Ma CTO
Michael serves as the architect of our technology, bringing deep expertise in algorithm development and cross-functional system design. He excels at bridging the gap between complex data and seamless system architecture, ensuring our hardware and software work in perfect harmony.
Emmanuelle Ghaleb Product Engineer
A biomedical engineer from Imperial College London with experience in both mechanical and electronic engineering. Emmanuelle leads physical prototyping efforts, ensuring fast iterative cycles and giving assembly feedback to the team. Emmanuelle leans on her prototyping and testing experience in the highly regulated medical device space.
Jacques Blagburn CEO
Jacques is the driving force behind Fether Labs, specializing in the intricate design of mechanical sensors and ultrasound transducers. His leadership and technical vision have already secured four prestigious awards and grants, setting a high bar for the company’s innovation.
Senthil Seveelavanan Dir Hardware
A true startup veteran, Senthil has over 15 years of experience in the consumer electronics space. His track record is defined by hands-on execution, having navigated five startups, launched six products, and successfully shepherded a company through an exit.
Dr James Choi CSO
With over 15 years of dedicated research in mechanical sensors and therapeutic ultrasound, James provides the scientific foundation for our work. He still serves as an Associate Professor at Imperial College London, staying at the absolute forefront of acoustic technology.
Alison Hart Dir Data Science
With a PhD in Applied Mathematics, Alison is an expert in mathematical modeling and experimentation across the medical, defense, and commercial sectors. A veteran founding engineer, specializing in building data pipelines and algorithm development from the ground up for high-growth tech startups
Michael Ma CTO
Michael serves as the architect of our technology, bringing deep expertise in algorithm development and cross-functional system design. He excels at bridging the gap between complex data and seamless system architecture, ensuring our hardware and software work in perfect harmony.
Emmanuelle Ghaleb Product Engineer
A biomedical engineer from Imperial College London with experience in both mechanical and electronic engineering. Emmanuelle leads physical prototyping efforts, ensuring fast iterative cycles and giving assembly feedback to the team. Emmanuelle leans on her prototyping and testing experience in the highly regulated medical device space.
Orlando Mathias Dir Product Experience
A seasoned innovator and founder of two award-winning agencies, Orlando leads our end-to-end product vision. He designs the gesture systems and spatial interaction grammars for our wristband. Bridging hardware and software to help shape the product roadmap and long-term experience strategy,
Zachary Berry Software Engineer
A dual-master’s graduate with distinction from Imperial College London and the RCA, Zak brings over four years of commercial experience in XR, robotics, and IoT. A Royal Commission scholar and international award winner, he holds a patent in prosthetics and have been published in renowned academic journals for his work in innovation design.
Joshua Ward MECHANICAL ENGINEER
With nearly a decade in design engineering at both startups and established companies, he is listed on 3 patents. In his free time, Josh has successfully completed his own Kickstarter products. He will be relying on his design for manufacture experience in commercial appliances and machinery to iterate the hardware.
Michael Ma CTO
Michael serves as the architect of our technology, bringing deep expertise in algorithm development and cross-functional system design. He excels at bridging the gap between complex data and seamless system architecture, ensuring our hardware and software work in perfect harmony.
Emmanuelle Ghaleb Product Engineer
A biomedical engineer from Imperial College London with experience in both mechanical and electronic engineering. Emmanuelle leads physical prototyping efforts, ensuring fast iterative cycles and giving assembly feedback to the team. Emmanuelle leans on her prototyping and testing experience in the highly regulated medical device space.
meet the team
meet the team
Jacques Blagburn CEO
Jacques is the driving force behind Fether Labs, specializing in the intricate design of mechanical sensors and ultrasound transducers. His leadership and technical vision have already secured four prestigious awards and grants, setting a high bar for the company’s innovation.
Michael Ma CTO
Michael serves as the architect of our technology, bringing deep expertise in algorithm development and cross-functional system design. He excels at bridging the gap between complex data and seamless system architecture, ensuring our hardware and software work in perfect harmony.
Dr James Choi CSO
With over 15 years of dedicated research in mechanical sensors and therapeutic ultrasound, James provides the scientific foundation for our work. He still serves as an Associate Professor at Imperial College London, staying at the absolute forefront of acoustic technology.
Orlando Mathias Dir Product Experience
A seasoned innovator and founder of two award-winning agencies, Orlando leads our end-to-end product vision. He designs the gesture systems and spatial interaction grammars for our wristband and AR/XR platforms. Bridging hardware and software to help shape the product roadmap and long-term experience strategy,
Senthil Seveelavanan Dir Hardware
A true startup veteran, Senthil has over 15 years of experience in the consumer electronics space. His track record is defined by hands-on execution, having navigated five startups, launched six products, and successfully shepherded a company through an exit.
Alison Hart Dir Data Science
With a PhD in Applied Mathematics, Alison is an expert in mathematical modeling and experimentation across the medical, defense, and commercial sectors. A veteran founding engineer, specializing in building data pipelines and algorithm development from the ground up for high-growth tech startups
Zachary Berry Software Engineer
A dual-master’s graduate with distinction from Imperial College London and the RCA, Zak brings over four years of commercial experience in XR, robotics, and IoT. A Royal Commission scholar and international award winner, he holds a patent in prosthetics and have been published in renowned academic journals for his work in innovation design.
Emmanuelle Ghaleb Product Engineer
A biomedical engineer from Imperial College London with experience in both mechanical and electronic engineering. Emmanuelle leads physical prototyping efforts, ensuring fast iterative cycles and giving assembly feedback to the team. Emmanuelle leans on her prototyping and testing experience in the highly regulated medical device space.
Joshua Ward Mechanical Engineer
With nearly a decade in design engineering at both startups and established companies, he is listed on 3 patents. In his free time, Josh has successfully completed his own Kickstarter products. He will be relying on his design for manufacture experience in commercial appliances and machinery to iterate the hardware.